



Robotiq TSF-85
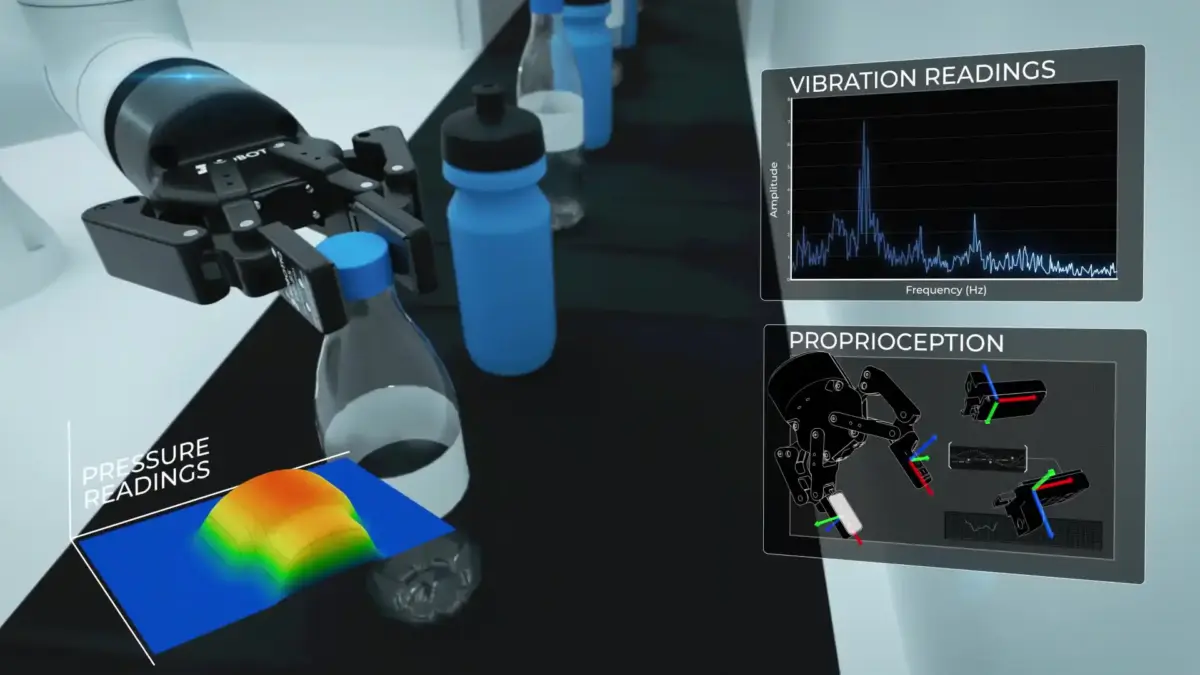
Les embouts tactiles Robotiq TSF-85 constituent une avancée décisive pour l'IA physique, en dotant les robots d'un sens du toucher précis. En détectant en temps réel la pression, les vibrations et la proprioception, ils permettent une manipulation fiable dans des environnements imprévisibles. Conçus pour remplacer directement les embouts standard de la pince Robotiq 2F-85, ces capteurs fournissent les données multimodales nécessaires aux expériences avancées en IA et aux tâches de manipulation complexes.
Description
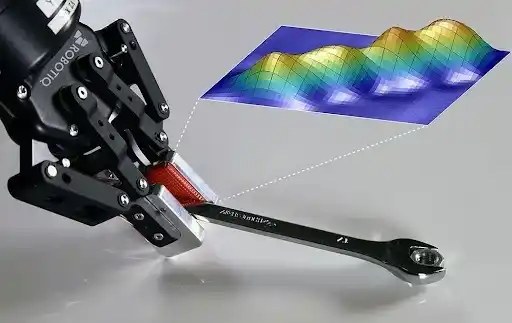
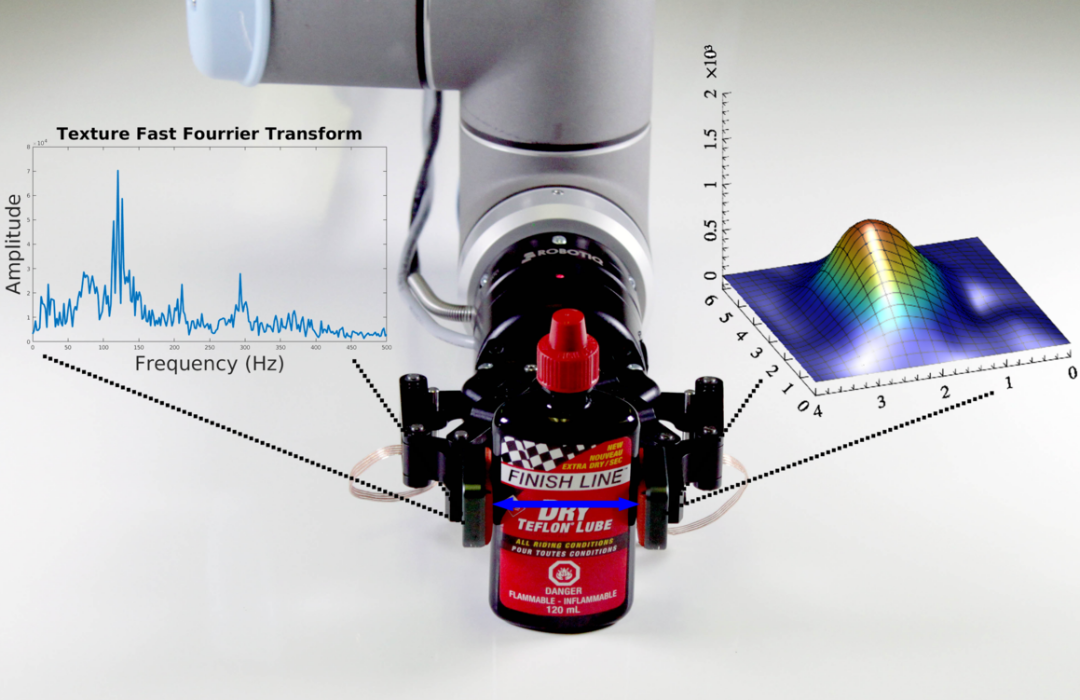
Le Robotiq TSF-85 apporte à la robotique la modalité manquante du toucher. Les extrémités des doigts utilisent un système de capteurs capacitifs en réseau pour surveiller à la fois les événements statiques et dynamiques sur le pavé tactile. Alors que les capteurs statiques mesurent la pression et la répartition des forces afin d'identifier les objets en fonction de leur forme et de leur rigidité, les capteurs dynamiques détectent les vibrations à haute fréquence. Cela permet au robot de détecter immédiatement un glissement naissant et d'empêcher la chute des pièces à usiner grâce à une réajustement dynamique de la préhension. De plus, une IMU interne à 3 axes assure un retour proprioceptif. Cela permet de déterminer l'orientation exacte du capteur dans le repère global, ce qui améliore considérablement la localisation des objets et l'évaluation de la qualité de la préhension. Le TSF-85 est donc bien plus qu'un simple accessoire de préhension ; c'est un instrument de mesure sophistiqué pour la reconnaissance de texture, la surveillance du glissement et la généralisation à travers différentes géométries de contact. Sa facilité d'intégration dans les environnements ROS2 existants en fait l'outil idéal pour le développement de la prochaine génération de systèmes robotiques autonomes et capables d'apprendre.
Détails techniques
| compatibilité | Robotiq 2F-85 |
| Technologie des capteurs | Système de capteurs à réseau capacitif |
| résolution | 28 pixels (grille 4×7) |
| fréquence | 1 000 Hz |
| plage de force | 0–225 N |
| proprioception | IMU interne à 3 axes (x, y, z) |
| dimensions | 28,4 mm x 44 mm |
| Assistance logicielle | ROS2, NVIDIA Isaac Sim |
| Fonctions du capteur | Pression, vibrations, orientation |
Détails techniques
Produits associés

Contactez-nous