



Robotiq TSF-85
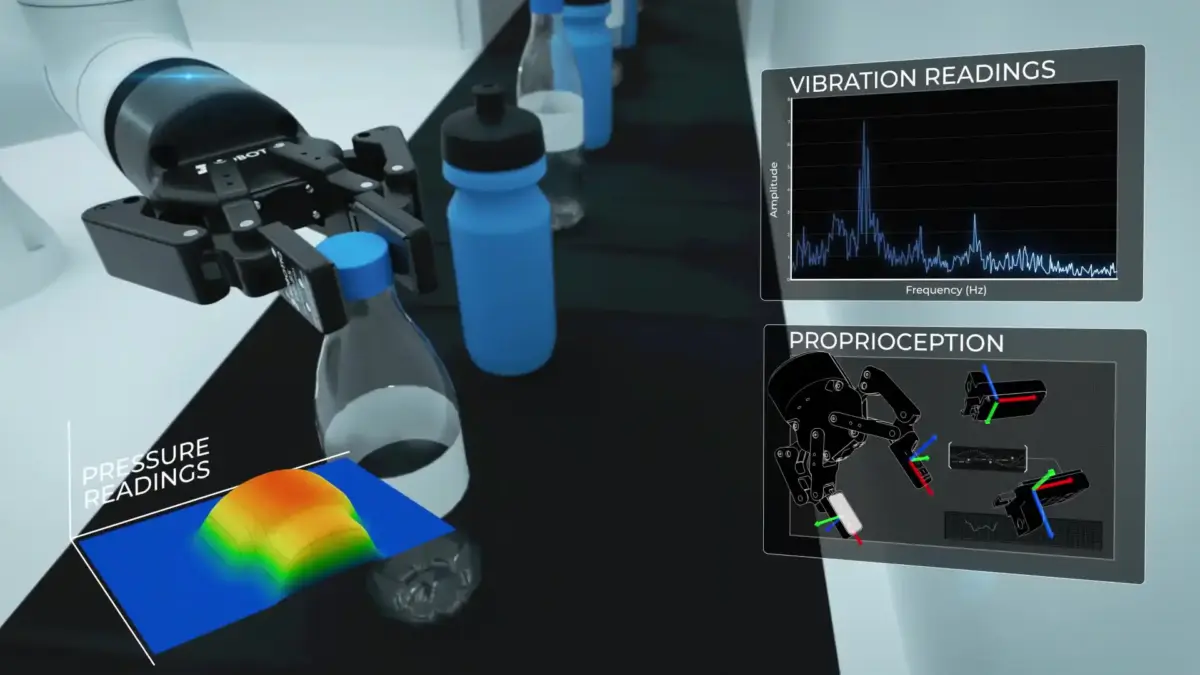
The Robotiq TSF-85 tactile sensor fingertips are a key enabler of Physical AI, providing robots with a precise sense of touch. By detecting pressure, vibration, and proprioception in real time, they enable reliable manipulation in unpredictable environments. The sensors are designed as a direct replacement for the standard fingertips of the Robotiq 2F-85 gripper and provide the necessary multimodal data for advanced AI experiments and complex manipulation tasks.
Description
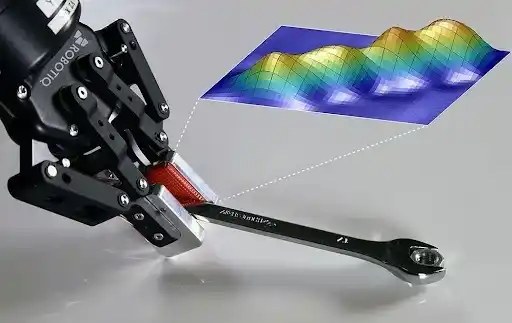
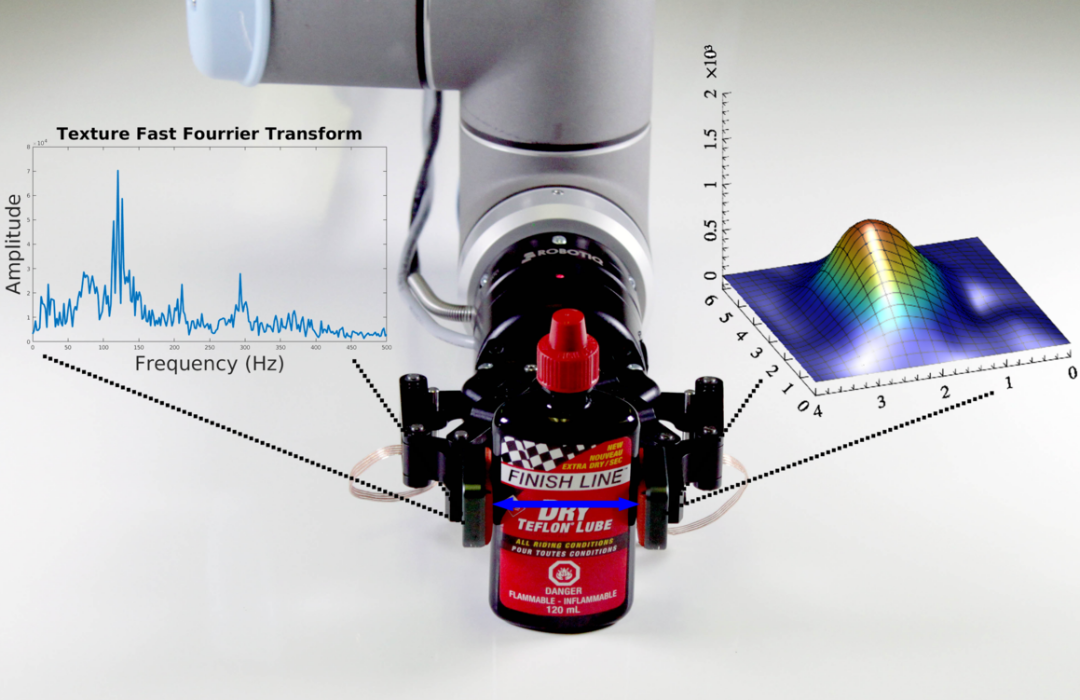
The Robotiq TSF-85 brings the missing sense of touch to robotics. The fingertips use a capacitive array sensor system to monitor both static and dynamic events on the sensor pad. While the static sensors measure pressure and force distribution to identify objects based on their shape and stiffness, the dynamic sensors detect high-frequency vibrations. This allows the robot to immediately detect the onset of slippage and prevent workpieces from falling by dynamically re-gripping them. Additionally, an internal 3-axis IMU provides proprioceptive feedback. This enables the exact orientation of the sensor to be determined within the global reference frame, significantly improving object localization and the assessment of grip quality. The TSF-85 is thus far more than just a gripper accessory; it is a highly advanced measurement instrument for texture recognition, slip monitoring, and generalization across different contact geometries. Its easy integration into existing ROS2 environments makes it the ideal tool for developing the next generation of autonomous, adaptive robotic systems.
Technical details
| compatibility | Robotiq 2F-85 |
| Sensor Technology | Capacitive array sensor system |
| Resolution | 28 pixels (4×7 grid) |
| Frequency | 1000 Hz |
| Force range | 0–225 N |
| Proprioception | Internal 3-axis IMU (x, y, z) |
| dimensions | 28.4 mm x 44 mm |
| Software Support | ROS2, NVIDIA Isaac Sim |
| Sensor functions | Pressure, Vibration, Orientation |
Technical details
Related products

Get in touch with us