






Pince de précision New Scale Robotics
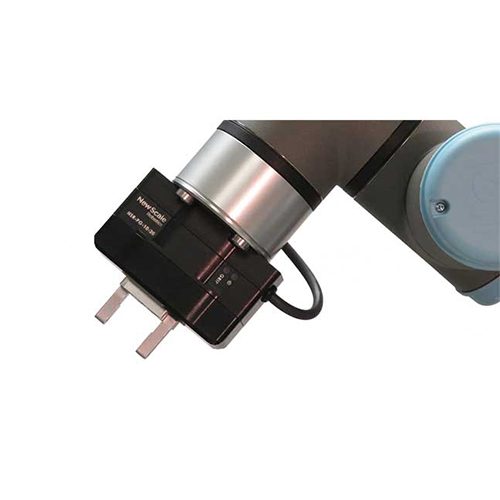
Le préhenseur / pied à coulisse de précision NSR-PG combine une manipulation ultraprécise des pièces et une mesure exacte en un seul outil. Grâce à sa conception compacte, son faible poids et l'utilisation de l'interface haute vitesse UR e-Series, ce système est idéal pour la manipulation, la mesure et le contrôle qualité de petits composants. Le préhenseur enregistrer la position absolue des doigts avec une résolution de 2,5 µm, permettant ainsi des processus d'inspection et de mesure automatisés directement sur le cobot UR.
Description
Le NSR-PG est idéal pour les applications impliquant des pièces petites, fragiles ou nécessitant une mesure précise. Les embouts peuvent être facilement remplacés ou remplacés par des variantes personnalisées.
Le logiciel URCaps d' , fourni avec préhenseur , le détecte préhenseur et permet de régler la force de préhension, la vitesse, les positions cibles et les processus de mesure en quelques clics.
Le logiciel génère de manière autonome les étapes de mouvement et de mesure nécessaires, ce qui est idéal pour la fabrication flexible, les tâches de tri, le remplacement des palpeurs de mesure ou la saisie automatisée des données SPC.
Grâce à la communication haut débit RS-485, jusqu'à trois outils NSR peuvent être utilisés en parallèle sur un robot, commandés via une seule interface sur le boîtier d'apprentissage.
Détails techniques
| plage d'ouverture | 0–20 mm |
| Plage de réglage des doigts | 0–52 mm |
| résolution de position | 2,5 µm |
| Précision de répétition de position | 5 µm |
| Précision de positionnement (linéaire) | 15 µm |
| Vitesse (programmable) | 2–30 mm/s |
| Force de préhension (bidirectionnelle) | 3–10 N |
| Résolution de la force de préhension | 0.5 N |
| Force motrice inverse (sans tension) | 1–3 N |
| Poids | 205 g |
| Dimensions recommandées de la pièce à usiner | jusqu'à 100 g |
| Robots UR compatibles | UR3e, UR5e, UR10e |
| certifications | CE, RoHS |
| montage | Directement sur la bride UR, 1 câble vers le port d'outil |
Détails techniques
Produits associés




Contactez-nous