



Robotiq Copilote de finition
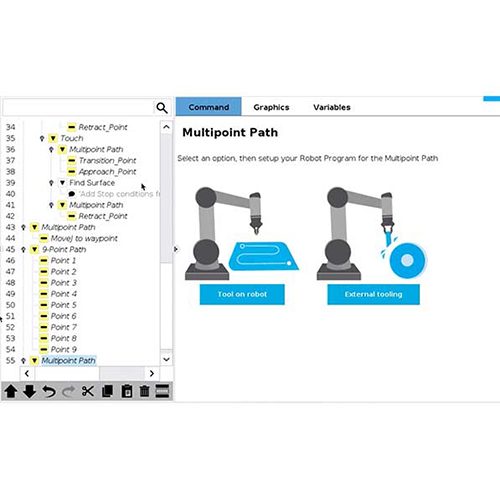
Robotiq Finishing Copilot est une extension logicielle pour Universal Robots qui simplifie considérablement les processus de finition tels que le ponçage, le polissage ou l'ébavurage. Le logiciel génère des trajectoires d'usinage complexes avec seulement quelques points de passage tout en assurant un contrôle constant de la force. Finishing Copilot permet à la fois des applications « pièce vers outil » (la pièce se déplace vers un outil fixe) et « outil vers pièce » (le robot guide l'outil).
Description
Finishing Copilot a été spécialement développé pour l'automatisation des processus de finition répétitifs. Le logiciel convertit le comportement du robot appris manuellement en trajectoires d'usinage stables et reproductibles, et ce avec un minimum d'efforts de programmation.
Fonctions centrales :
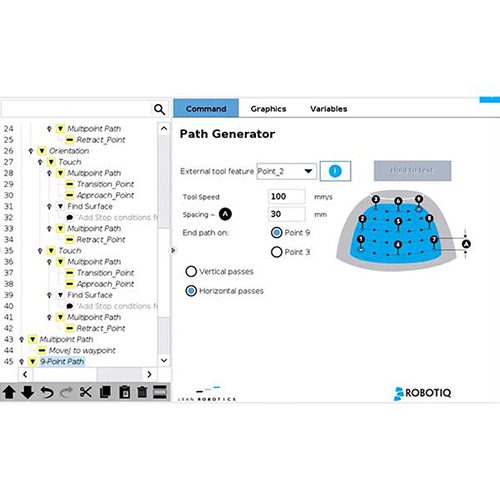
- Générateur de trajectoire
À partir de quelques points de repère, le Copilot crée automatiquement une trajectoire d'usinage fluide et optimisée, idéale pour le meulage, le polissage, le satinage ou l'ébavurage. - Contrôle constant de la force
Pour obtenir une surface régulière, le robot maintient la même force à chaque cycle et contrôle individuellement la rigidité de chaque axe.
TCP externe Finishing Copilot détecte que l'outil est monté à l'extérieur (par exemple, une rectifieuse stationnaire). Le robot guide la pièce avec précision au-dessus du point de contact défini en externe.- Compensation d'usure
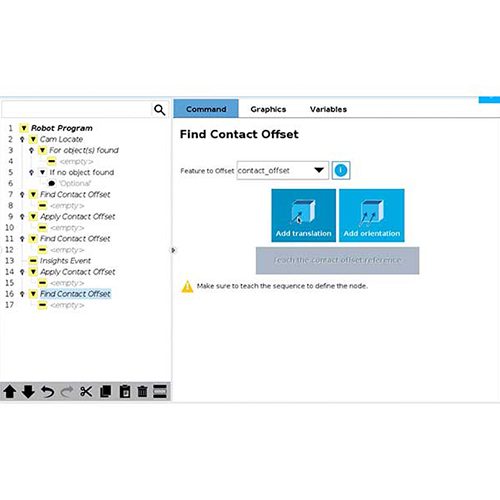
Un point de référence sur l'outil détecte l'usure de l'outil et adapte automatiquement le programme, sans retouche manuelle. - Gestion adaptative des processus
Si la position de la pièce à usiner change légèrement, le trajet est automatiquement corrigé, ce qui est idéal en cas de tolérances ou de tensions variables. - Guidage manuel
Le robot peut être guidé manuellement sur la surface afin d'apprendre intuitivement des mouvements et des trajectoires naturels.
Finishing Copilot est donc idéal pour les entreprises qui souhaitent automatiser rapidement et de manière reproductible des processus d'usinage complexes.
Détails techniques
| Robots compatibles | Série UR-e |
| TCP externe | Oui, librement définissable |
| Générateur de chemin | <10 Wegpunkte für vollständige Trajektorie |
| contrôle de force | Force constante, rigidité réglable par essieu |
| Compensation de l'usure | Précision de 0,2 mm |
| Tâches prises en charge | Meulage, polissage, ébavurage, palpage, détection d'arêtes |
| intégration | URCap, installation via USB |
| Utilisation | Interface guidée étape par étape dans le Teach Pendant |
Détails techniques
Produits associés



Contactez-nous