





Interface pour machines de moulage par injection IMMI
L'interface IMMI (« Injection Molding Machine Interface ») permet l'intégration sûre et conforme aux normes d'un robot Universal Robots dans une machine de moulage par injection. Elle gère tous les signaux critiques pour la sécurité entre la machine et le robot et garantit que le cobot ne peut intervenir que lorsque l'état de la machine le permet. L'IMMI répond ainsi aux exigences fondamentales des directives officielles d'Universal Robots en matière de moulage par injection et constitue le composant central pour une automatisation fiable des processus de retrait et d'insertion dans le moulage par injection.
Description
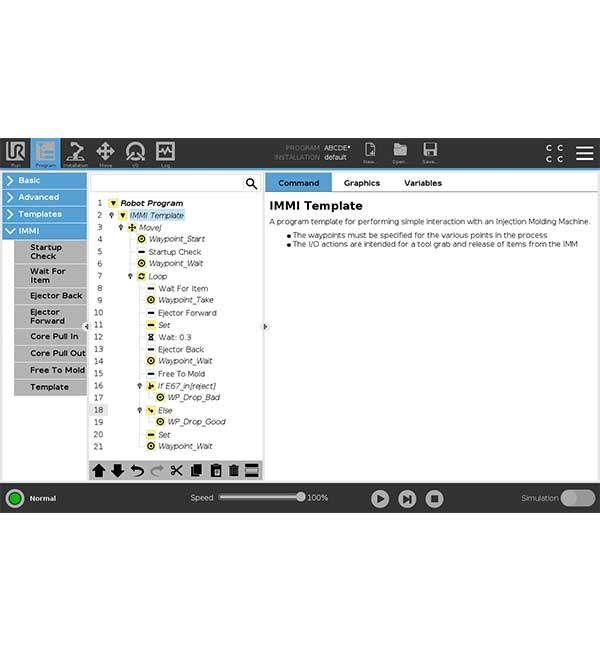
L'interface IMMI garantit la collaboration sûre et fiable d'un cobot Universal Robots avec une machine de moulage par injection. Elle surveille tous les états de la machine liés à la sécurité et fournit les signaux appropriés au robot. Ainsi, le cobot sait à tout moment si l'outil est ouvert, fermé ou verrouillé et s'il peut se déplacer en toute sécurité dans l'espace de travail.
Dans le même temps, la machine de moulage par injection reçoit des informations claires sur la position du robot et sur la disponibilité de l'espace pour les mouvements de l'outil. Cela permet de synchroniser avec précision les processus de retrait et d'insertion avec le cycle de la machine : l'outil s'ouvre, la validation est effectuée, le cobot effectue le retrait, signale que « l'espace est libre » et la machine peut immédiatement poursuivre son travail.
L'IMMI facilite l'intégration, en particulier dans les installations existantes, car aucune modification profonde n'est nécessaire au niveau de la commande de la machine. Il augmente la sécurité des processus, améliore la répétabilité et permet une automatisation stable des cellules d'injection, indépendamment du type de machine ou du fabricant.
Détails techniques
| fonction principale | Connexion sécurisée entre le cobot UR et la machine de moulage par injection |
| signaux machine | Outil ouvert/fermé, verrouillage, démarrage/fin du cycle, validations |
| Signaux robotiques | « Zone libre », présence dans la salle des outils, état du processus |
| logique de sécurité | Bloque les mouvements du robot en cas d'état d'outil non sécurisé |
| intégration | Interfaces E/S industrielles, compatibles avec la commande UR |
| domaine d'utilisation | Prélèvement, insertion, chargement d'insert, manipulation dans le processus IM |
| objectif opérationnel | Synchronisation du mouvement de l'outil et de l'accès au cobot |
| compatibilité | Machines de moulage par injection de tous les fabricants courants |
Détails techniques
Produits associés




Contactez-nous