




Robotiq Force Copilot
Robotiq Force Copilot is a software extension for Universal Robots that makes force-controlled work fast and intuitive. The software uses data from the integrated UR force/torque sensor and transforms demanding tasks such as joining, polishing, pressing, or edge detection into easy-to-program steps. Force Copilot enables precise process control and significantly reduces programming effort.
Description
Force Copilot utilizes the UR e-Series force sensor and provides predefined functions that facilitate typical force-controlled processes. These include:
- Path recording: Manually demonstrate movement paths and reproduce them exactly
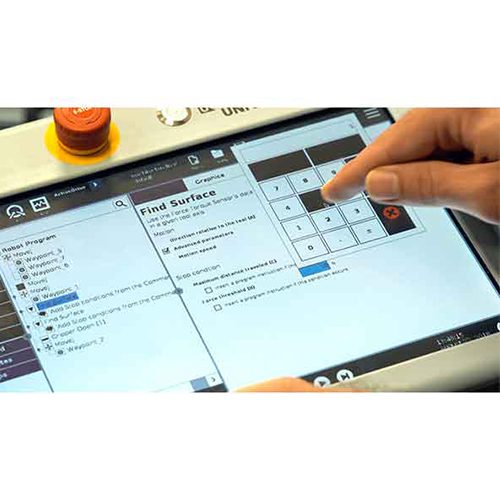
- Surface Finding: Automatic detection of surfaces, edges, and contact points
- Insertion Tasks: Precise joining and pressing despite component tolerances
- Alignment & Adaptive Tasks: Automatic adjustment to actual workpiece positions
- Force Control: Constant force during movement, ideal for grinding or polishing processes
Thanks to visual guidance and guided menu structures, even complex tasks can be programmed without in-depth robot expertise. Force Copilot increases process reliability, simplifies automation, and is particularly suitable for assembly, quality control, polishing, and the precise approach to positions or contact points.
Technical details
| Compatible robots | UR-e-Series |
| External force sensor | Not required – uses integrated UR sensors |
| integration | URCap (installation directly via USB) |
| Areas of application | Joining, polishing, grinding, quality inspection, edge detection, adaptive assembly |
Technical details
Related products



Get in touch with us