






Robotiq 3-finger
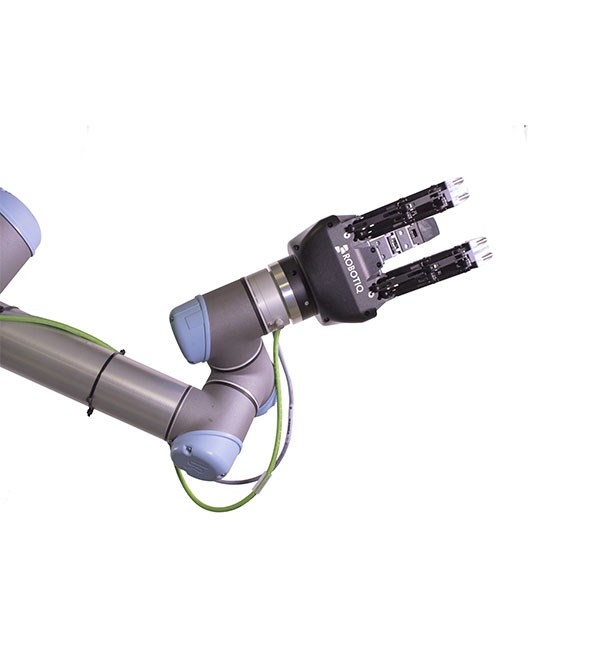
The Robotiq 3-Finger is an electric, versatile gripper collaborative robots that can safely handle objects of various shapes thanks to three individually controllable fingers and four gripping modes. With a payload of up to 10 kg (form-fitting) and a maximum stroke of 155 mm, it is suitable for pick & place, machine tending, assembly, and flexible handling tasks. Easy integration via URCap and customizable finger control make it an efficient solution for varying workpieces in production processes.
Description
The Robotiq 3-finger offers exceptional flexibility for applications where workpiece geometry varies greatly. Each finger has multiple joints and can be controlled individually, allowing for optimal adaptation to complex shapes. This makes the gripper for production environments with frequently changing products, small batches, or challenging gripping situations.
The four selectable gripping modes cover a wide range of applications: from precise gripping of small parts to wide gripping of large objects and form-fitting holding. Sensitive workpieces can be handled gently thanks to adjustable force. With seamless plug-and-play integration into Universal Robots systems, the gripper can be gripper set up, parameterized, and programmed.
With its robust mechanical structure, reliable electronics, and low-maintenance operation, the Robotiq 3-finger gripper is a sustainable solution for assembly, machine tending, packaging, or inspection applications. For companies that require high flexibility with consistent process reliability, it offers clear advantages over traditional two-finger grippers.
Technical details
| grab stroke | 0–155 mm |
| Maximum payload (form-fitting) | up to 10 kg |
| Maximum payload (fingertips) | up to 2.5 kg |
| grasping modes | Basic / Wide / Pinch / Scissor |
| Gripping force (pincer grip) | approx. 30–70 N |
| repeatability | approx. 0.05 mm |
| Weight | approx. 2.3 kg |
| operating voltage | 24 V DC |
| communication | URCap compatible, individual finger control |
Technical details
Related products




Get in touch with us